

扫一扫
分享文章到微信
扫一扫
关注官方公众号
至顶头条
用肉眼观察角落另一边的盲区或许不太现实,然而经过科学家们多年研究,已经可以利用专门的激光器实现了。而现在,麻省理工计算科学与人工智能实验室(MIT CSAIL)的研究者们又向前迈进了一步:他们开发了一套成像系统CornerCameras,可以从地面反射的微光中探测到物体。
这项研究的原理很简单:所有物体都会反射光线,CornerCameras系统能够使用智能手机摄像头采集的视频,实时测量隐藏物体的速度和轨迹。当然,人眼是无法看清这种变化的,但摄像头可以,通过观察角落附近的地面,再根据地面阴影的变化,判断另一边是否有东西在移动。
MIT CSAIL一位发言人说,这项技术有一系列应用场景,包括消防队员在焚烧的建筑物内寻找人,以及自动驾驶汽车探测盲区内的行人等等,在这种应用场景中,它并不需要任何细节,只要知道那边有东西就行了。他还说,这个系统方便的地方在于,可以使用智能手机摄像头采集的视频。
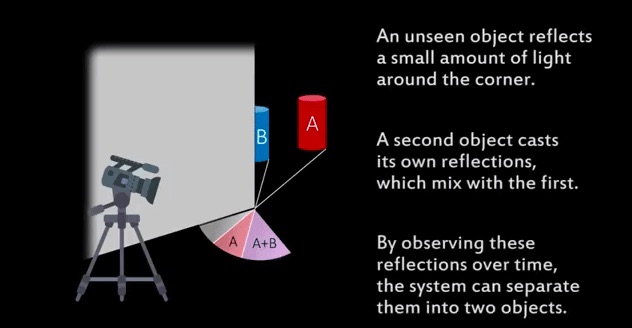
博士毕业生Katherine Bouman是该系统论文的主要作者,她表示,“即使这些‘半影’(模糊的阴影)实际上对于摄像头来说并不可见,我们还是可以通过系统看到它们,以确定它们在哪里,以及它们要去哪里。”
而且,为了观察这种方法对自动驾驶汽车是否可行,她们在阴影角度拍摄了一段远处角落的视频,结果依然能够获得明确的信号。也就是说,即便汽车距离角落很远,也依然能够使用这套系统。
不过,这种方法也存在一些弊端:尽管它可以检测盲区内障碍物的移动速度、位置,但无法辨认该物体的任何细节信息,包括边缘、形状或纹理。相较于激光器的激光反弹原理,这种技术只能检测出在明亮环境下移动的人或物体。而且,用于分析的视频源也必须保持稳定,否则也会出现纰漏。
尽管存在漏洞,但就目前而言,这套系统已经是一项突破了。它在室外明亮光下表现得很出色,甚至在雨中也能工作。
关于雨中作业,Bouman比较惊讶,“由于雨水改变了地面的颜色,所以我认为,系统无法看到光线中千分之一的微小差异。” 不过,“由于系统整合了几十张图像的信息,足以抵消雨滴的影响,所以你可以看到物体的移动。”
CornerCameras系统目前需要一台笔记本来进行必要的图像处理,但Bouman说,这个问题可以在未来得到解决:“从计算角度看,该系统完全可以在手机上运行,只不过我们还没有这么做而已。”

Bouman同麻省理工学院教授Bill Freeman、Antonio Torralba和Greg Wornell共同撰写了这篇论文,Bouman将在本月晚些时候在威尼斯举办的International Conference on Computer Vision(国际计算机视觉大会)上介绍最新工作。
<来源:the Verge;编译:科技行者>

如果您非常迫切的想了解IT领域最新产品与技术信息,那么订阅至顶网技术邮件将是您的最佳途径之一。